OpenCV 相机校正过程中,calibrateCamera函数projectPoints函数的重投影误差的分析 |
您所在的位置:网站首页 › 相机all i › OpenCV 相机校正过程中,calibrateCamera函数projectPoints函数的重投影误差的分析 |
OpenCV 相机校正过程中,calibrateCamera函数projectPoints函数的重投影误差的分析
|
OpenCV 校正过程中,calibrateCamera函数的ret和重投影误差的分析
OpenCV对相机进行校正的过程中,校正返回值retval和重投影误差的计算公式表示和分析。
OpenCV 校正过程中,calibrateCamera函数的ret和重投影误差的分析一、前言二、calibrateCamera( )函数分析三、projectPoints()函数分析四、具体实验和算法对比五、参考附录
一、前言
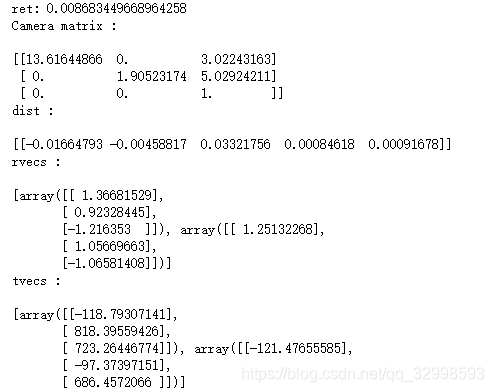
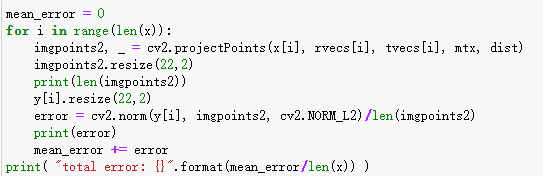
本文主要是讲解Python利用OpenCV进行相机校正过程中,几个重点参数的分析。标定的过程就不再一一赘述了,很多博客和网站都在讲解怎么进行标定。本文章主要分析,标定过程中的误差计算公式,和对calibrateCamera( ) 和 projectPoints( ) 两个函数得到的误差不同的原因进行分析。 本文重点分析重投影误差的计算方式。准确描述OpenCV自带的函数,和各个文档,教程里面所说的重投影误差计算的流程进行分析和对比,描述官方的重投影误差和教程实现重投影误差的差别。 我认为OpenCV官方和其他大多数地方的教程,给的重新计算重投影误差的结果,其计算的表达式,也是不准确的。 正确的方法是相机校正的方法输出的重投影误差ret。使用的是RMS均方根误差。另外教程和博客,给的是MSE均方误差 二、calibrateCamera( )函数分析 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(x_world, y_voltage, (224, 224), None, None)这里,ret表示的是重投影误差;mtx是相机的内参矩阵;dist表述的相机畸变参数;rvecs表示标定棋盘格世界坐标系到相机坐标系的旋转参数:rotation vectors,需要进行罗德里格斯转换;tvecs表示translation vectors,主要是平移参数。 其他几个参数,OpenCV的官网都进行了仔细分析,在这个网站上去仔细的看,每个参数对应的数学公式。https://docs.opencv.org/3.4/dc/dbb/tutorial_py_calibration.html 主要分析ret这个值,也就是retval,这个是重投影误差。 import numpy as np import cv2 as cv2 import glob # termination criteria criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) # prepare object points, like (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0) objp = np.zeros((6*7,3), np.float32) objp[:,:2] = np.mgrid[0:7,0:6].T.reshape(-1,2) # Arrays to store object points and image points from all the images. objpoints = [] # 3d point in real world space imgpoints = [] # 2d points in image plane. images = glob.glob('*.jpg') for fname in images: img = cv2.imread(fname) gray = cv2.cvtColor(img, cv.COLOR_BGR2GRAY) # Find the chess board corners ret, corners = cv2.findChessboardCorners(gray, (7,6), None) # If found, add object points, image points (after refining them) if ret == True: objpoints.append(objp) corners2 = cv2.cornerSubPix(gray,corners, (11,11), (-1,-1), criteria) imgpoints.append(corners) # Draw and display the corners cv2.drawChessboardCorners(img, (7,6), corners2, ret) cv2.imshow('img', img) cv2.waitKey(500) cv2.destroyAllWindows() # Calibration, Now that we have our object points and image points, we are ready to go for # calibration. We can use the function, cv.calibrateCamera() which returns the camera matrix, # distortion coefficients, rotation and translation vectors etc. ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) print("ret:", ret) print("Camera matrix : \n") print(mtx) print("dist : \n") print(dist) print("rvecs : \n") print(rvecs) print("tvecs : \n") print(tvecs)其中,这个ret也就是retval,表示的是重投影误差,是算法自动返回的,其表达式为: R e p p o i n t s x ′ = k [ R ∣ T ] X . Reppoints \ x'= k [R|T]X \,. Reppoints x′=k[R∣T]X. 其中,Reppoints x’是[Nx2],表示的图像像素平面的2维坐标点,X是[Nx3]表示的3D世界坐标系下的3维坐标点。也就是棋盘格所构造的3D坐标系的大小。 r e t = r e p r o _ e r r o r = ∣ ∣ x ′ − x ∣ ∣ 2 2 t o t a l _ p o i n t s = ∣ ∣ x ′ − x ∣ ∣ 2 t o t a l _ p o i n t s ret =repro \_error =\sqrt{\frac{ ||x'-x||_{2}^2}{total\_points}}={\frac{ ||x'-x||_{2}}{\sqrt{total\_points}}} ret=repro_error=total_points∣∣x′−x∣∣22 =total_points ∣∣x′−x∣∣2 这就是cv2.calibrateCamera()返回的值中,ret也就是重投影误差的计算公式。求的是RMS均方根误差,对所有的点,求二范数,然后求平均再开根号,得到RMS误差。 其中,二范数用的是:cv2.norm(data1, data2, cv2.NORM_L2)计算得到: n o r m ( x , x ′ ) = ∣ ∣ x − x ′ ∣ ∣ 2 = ∣ ∣ x − x ′ ∣ ∣ 2 2 = ( x 1 − x 1 ′ ) 2 + . . . + ( x n − x n ′ ) 2 norm(x,x')=||x-x'||_2=\sqrt{|| x-x'||_{2}^2}=\sqrt{(x_1-x'_1)^2+...+(x_n-x'_n)^2} norm(x,x′)=∣∣x−x′∣∣2=∣∣x−x′∣∣22 =(x1−x1′)2+...+(xn−xn′)2 三、projectPoints()函数分析 imgpoints2, _ = cv.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) 原始的计算方法,大多数教程和博客,以及OpenCV文档,给出的重投影误差计算方法。对相机标定得到的参数,带回原始的投影公式,重新计算从3D世界坐标系投影到2D图像平面坐标系的新的图像像素值,然后计算重投影误差。其中,objpoints表示世界坐标系的坐标,也就是棋盘格的坐标系,rvecs,tvecs,mtx,dist就是相机标定得到的那些参数。 mean_error = 0 for i in range(len(objpoints)): imgpoints2, _ = cv.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv.norm(imgpoints[i], imgpoints2, cv.NORM_L2)/len(imgpoints2) mean_error += error print( "total error: {}".format(mean_error/len(objpoints)) )这里计算误差的方式,我们将得到的值和上面相机校正返回的值ret,不一样。因此,需要考虑,将这个官方给定的计算方式,进行重新计算。如果你不在意准确的值,就不用进行优化。 本文是准确的探索,重投影误差的计算方式。按照上面的算法流程,我们可以得到以下的计算重投影误差的公式: r e p r o _ e r r o r = ∣ ∣ x ′ − x ∣ ∣ 2 t o t a l _ p o i n t s repro\_error={\frac{ {||x'-x||_{2}}}{total\_points}} repro_error=total_points∣∣x′−x∣∣2 很明显,均方误差的计算,按照上述的表达式,是不准确的。误差开根号,然后除以点数多少,只能说是每个点的平均欧式误差。MSE误差。 校正之后的重投影误差计算方法或者代码。因此,需要求得准确的均方根误差,我们应该是先求平方,求平均,在开根号。因此,需要将代码改为: mean_error = 0 for i in range(len(objpoints)): imgpoints2, _ = cv.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv.norm(imgpoints[i], imgpoints2, cv.NORM_L2) total_error += error*error print( "rms error: {}".format(np.sqrt(total_error/(len(objpoints)*len(imgpoints2)))))上述的流程才是: r e p r o _ e r r o r = ( ∣ ∣ x − x ′ ∣ ∣ 2 2 t o t a l _ p o i n t s repro\_error=\sqrt{\frac{(||x-x'||_2^2}{total\_points}} repro_error=total_points(∣∣x−x′∣∣22 与我们的cv2.calibrateCamera()返回的值是一样的。 四、具体实验和算法对比相机校正返回的值 函数的返回值 其中的返回的误差项,真实值:ret 为 ret: 0.008683449668964258 使用大多数教程和博客的算法来计算的误差值,是有差别的: 参考代码给出的输出误差结果 total error: 0.0018512112930950482 按照自己修正的代码,来进行重投影误差计算: 因此,和我们相机校正输出的=重投影误差是一样的。 五、参考附录下面是原始C++函数,计算重投影误差的流程,我上面的公式就是按照这个算法来解释的: static double computeReprojectionErrors( const vector& objectPoints, const vector& imagePoints, const vector& rvecs, const vector& tvecs, const Mat& cameraMatrix, const Mat& distCoeffs, vector& perViewErrors ) { vector imagePoints2; int i, totalPoints = 0; double totalErr = 0, err; perViewErrors.resize(objectPoints.size()); for( i = 0; i |
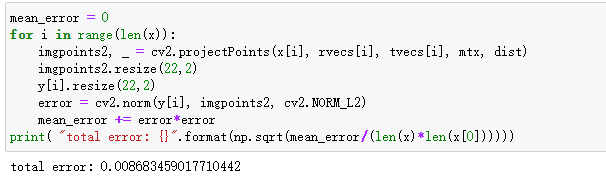 输出的重投影误差为:total error: 0.008683459017710442。
输出的重投影误差为:total error: 0.008683459017710442。【本文地址】